Skip to main content
Search
Search This Blog
Mechanical Engineering
Technical Arrow
Posts
Showing posts from 2008
Show all
December 29, 2008
Demineralizers
December 29, 2008
Boilers
December 29, 2008
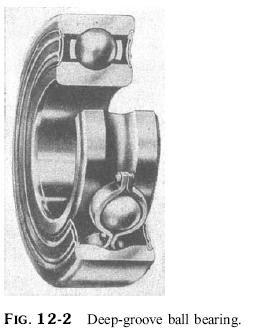
CLASSIFICATION OF ROLLING-ELEMENT BEARINGS
December 06, 2008
Types of Control Valves (Part 2)
December 06, 2008
Types of Control Valves(Part 1)
December 06, 2008
Introduction to Control Valves (symbols)
December 06, 2008
Cooling Towers
Newer Posts
Older Posts
Home