Skip to main content
Search
Search This Blog
Mechanical Engineering
Technical Arrow
Posts
Showing posts from September, 2008
Show all
September 14, 2008
CAT Engines Course ( Part 1)
September 14, 2008
Difference between MUI and EUI in cylinder head
September 13, 2008
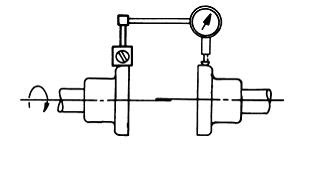
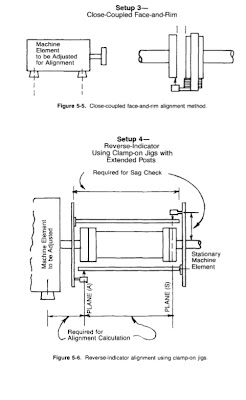
Coupling Alignment
September 13, 2008
Types of Gears
September 10, 2008
Alignment and Balancing
Newer Posts
Older Posts
Home